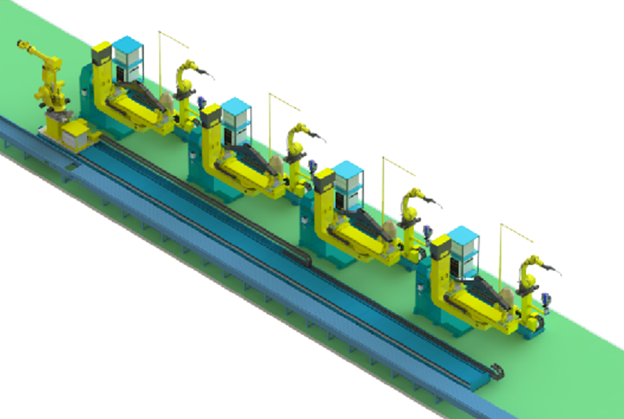
车架焊接机器人工作站主要由一台地轨倒吊三轴行走机构(X+Z+旋转)、一台松下机器人、一套松下焊接设备、两台负载1吨L型两轴伺服联动变位机以及其余周边设备构成。
焊接行走机构的X轴、Z轴和旋转轴、L型两轴变位机的旋转变位轴均为机器人的外部附加轴进行伺服联动控制。

.png)