.png)


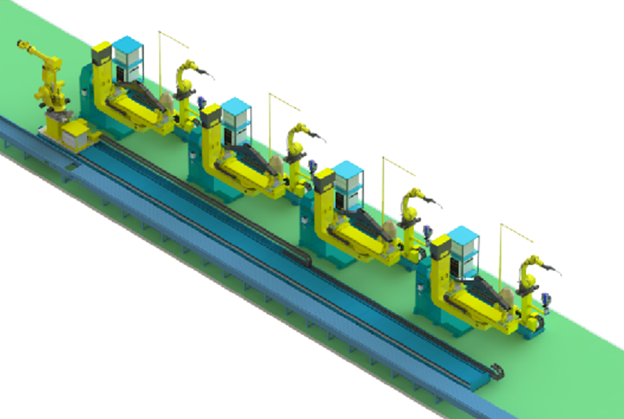
风力发电支架焊接机器人工作站主要由两台两轴龙门行走机构、两台机器人、两套焊接设备、一台 L 型两轴伺服联动变位机以及其余周边设备构成。
三轴龙门行走机构、L 型变位机的翻转轴和旋转轴均作为机器人的外部附加轴进行伺服联动控制。较之于非联动控制,上述控制方式使得设备具有定位精准、运动平稳等优点。
高精度的齿轮、齿条和良好的润滑使得龙门外部行走机构具有长寿命使用的特点;L 型变位机采用伺服电机、RV 减速机和齿轮传动机构,合理的元件选型以及高等级的元件精度使得该变位机具有定位精准、驱动扭矩大等优点。
通过六轴机器人、三轴龙门行走机构以及两轴 L 型变位机配合使用,使得该机器人工作系统有较大的工作范围和良好的系统柔性,即使大型复杂工件上可达性不好的空间焊缝,也可轻松胜任!