.png)


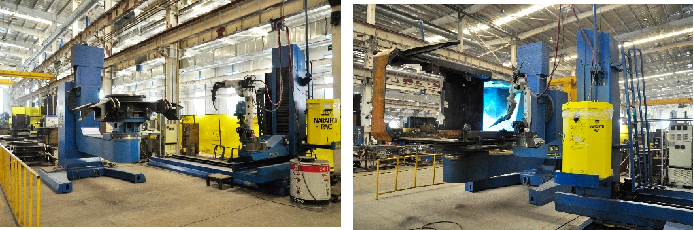
车架机器人焊接工作站采用11轴联动三轴行走正装机器人,这是一种高度集成和灵活的机器人焊接解决方案,旨在满足重型结构件如车架、框架等大型工件的焊接需求。
这种设计不仅扩展了机器人的工作空间,而且显著提高了系统的柔性,使得焊接工作站能够处理各种复杂的焊接任务。
以下是该系统的关键特点和优势:
1.11轴联动:机器人本体通常具有6个自由度(轴),而额外的5轴联动来自于三轴行走机构和可能的工件旋转机构。这种高自由度的设计使得机器人能够**地调整姿态和位置,以达到**的焊接角度和路径,从而提高焊接质量和效率。
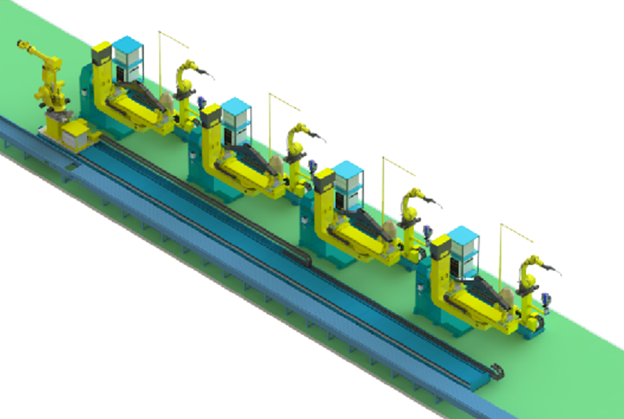
2. 三轴行走:机器人安装在可以沿三个方向(通常是X、Y、Z轴)移动的行走机构上,这意味着机器人不仅可以垂直升降(Z轴),还可以在水平面上(X轴和Y轴)自由移动。这种能力极大地扩展了机器人的工作范围,使其能够覆盖更大的焊接区域,无需频繁重新定位工件。
3. 系统柔性:11轴联动的配置使得机器人能够灵活适应不同尺寸和形状的工件,这在处理多品种、小批量的生产任务时尤为重要。通过调整行走机构和工件定位装置,工作站可以快速切换到不同的焊接程序,减少了生产准备时间和成本。
4. 提高焊接质量:由于机器人能够从多个角度接近工件,因此可以减少焊接死角,提高焊缝的可达性和一致性,从而确保焊接质量和生产效率。
5. 集成控制系统:11轴联动的机器人焊接工作站通常配备有先进的控制系统,能够实现对所有轴的同步控制,确保焊接过程的平稳和**。这种集成控制也简化了编程和操作流程,提高了工作站的易用性和可靠性。
6. 安全性和人机协作:高轴数的机器人工作站通常配备了完善的安全系统,包括传感器、摄像头和防护栏,以确保操作人员的安全。同时,一些系统还支持一定程度的人机协作,允许操作人员在确保安全的前提下,与机器人共同完成某些任务。总之,车架机器人焊接工作站采用11轴联动三轴行走正装机器人的设计,它不仅提升了焊接工作站的性能和效率,也为客户提供了更加灵活和智能的生产解决方案。