.png)


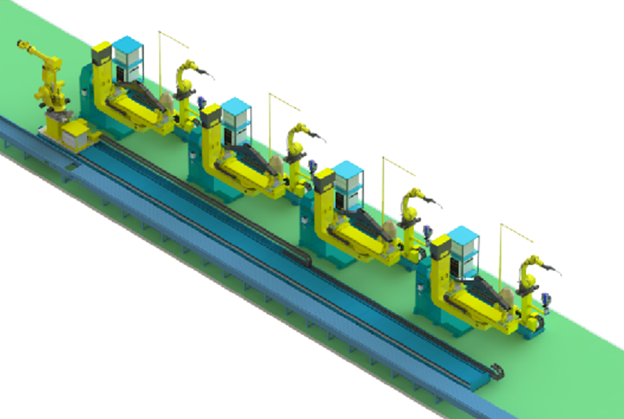
前叉机器人焊接工作站
前叉机器人焊接工作站采用双工位交替工作模式,是提升焊接效率和优化生产流程的有效策略。这种工作站设计通过两个独立工位的协同作业,实现了生产过程的连续性和高效率。
以下是该设计的主要特点和优势:
1.双工位设计:工作站设置有两个独立的工位,允许在其中一个工位进行焊接操作的同时,另一个工位可以进行工件的装卸、定位、预处理等辅助工作。这种设计避免了单一工位在装卸工件时的等待时间,提高了整体的生产效率。
2. 交替工作模式:当一个工位完成焊接后,机器人可以立即转移到另一个已经完成辅助工作的工位开始新的焊接任务。这样,两个工位轮流进行焊接和辅助工作,实现了无缝衔接,减少了非生产性时间,提高了工作站的吞吐量。
3. 节省辅助工作时间:双工位交替工作模式有效地减少了辅助工作时间,如工件的装卸、定位和预处理时间。因为这些操作可以在一个工位进行,而机器人在另一个工位进行焊接,从而最大限度地利用了工作站的生产能力。
4. 提高焊接效率:由于双工位设计可以连续进行焊接,减少了因工件更换而产生的停顿,工作站能够保持较高的焊接效率。同时,这种模式还有助于保持焊接过程的一致性和质量,因为机器人可以专注于焊接任务,而不会受到频繁的启动和停止干扰。
5. 增强生产柔性:双工位工作站可以更容易地适应多品种、小批量的生产模式。在等待焊接工位完成时,另一个工位可以准备下一个不同型号或尺寸的工件,减少了生产线的转换时间,提高了生产系统的灵活性。
6. 优化资源配置:通过双工位交替工作,可以更有效地利用工作站内的资源,包括机器人、焊接设备和工装夹具。在等待焊接工位完成时,机器人可以利用这段时间在另一个工位进行辅助工作,如预定位或预处理,从而提高了设备的利用率和投资回报率。
总之,前叉机器人焊接工作站采用双工位交替工作模式,通过优化工作站布局和作业流程,显著提升了焊接效率和生产灵活性,同时减少了辅助工作时间,为客户提供了更加高效和经济的自动化焊接解决方案。