.png)


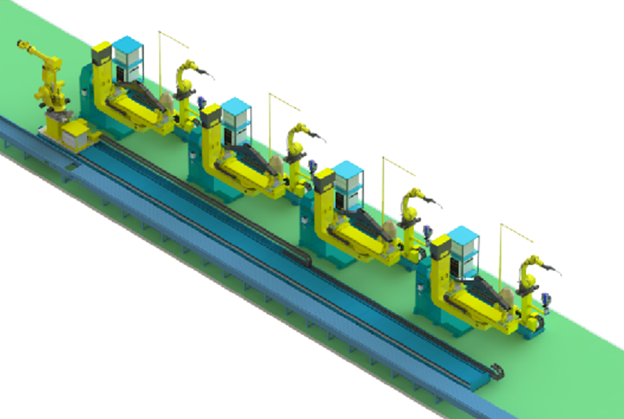
推土铲焊接机器人工作站
推土铲焊接机器人工作站,采用3轴行走正装机器人,代表了现代焊接自动化技术的较高水平。这种设计不仅显著扩展了机器人的作业空间,还极大地提高了系统的柔性,能够适应复杂多变的焊接需求,尤其在处理大型结构件如推土铲时,展现出卓越的性能和效率。
以下是该工作站的关键技术和优势:
1.3轴行走正装机器人:机器人安装在可以沿三个方向(通常是X、Y、Z轴)自由移动的行走机构上,这种设计使得机器人能够覆盖更大的作业区域,从而在焊接大型和异形工件时,能够灵活调整位置,提高焊接可达性和精度。
2. 高性能接触传感和高速电弧传感:机器人配备有先进的传感器,能够实时检测工件的几何误差和位置偏差,通过实时反馈和控制算法,自动调整焊接路径和姿态,确保即使在工件存在轻微变形或位置误差的情况下,也能获得一致的焊接质量。
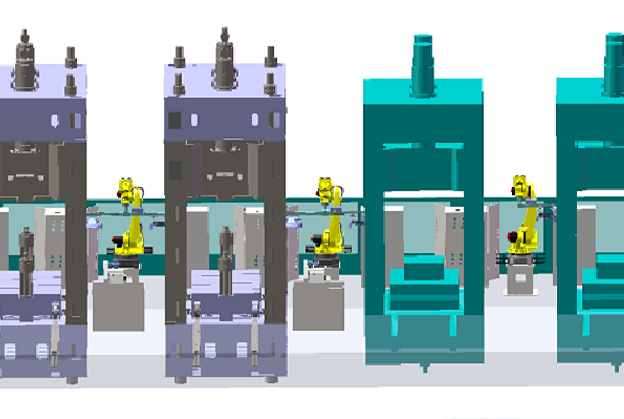
3. 特制焊枪与内外焊缝处理:工作站使用特制的焊枪,专门设计用于焊接推土铲后背的内外焊缝,这种焊枪能够深入狭窄的空间,克服传统焊接设备无法触及的焊接位置,从而提高了焊接的可达性和效率,确保了内外焊缝的完整性和质量。
4. 焊接品质的稳定性:通过结合高性能的传感器和自适应控制技术,工作站能够实时监测和调整焊接参数,如电流、电压和速度,以补偿工件的误差,从而保证焊接过程的稳定性和焊接接头的高质量。
5. 系统柔性与生产效率:3轴行走正装机器人的设计,加上自动化的传感器和焊枪,使得工作站能够处理不同尺寸和形状的推土铲,减少了更换工装夹具的时间,提高了生产效率和系统的柔性,适合于多品种、小批量的生产模式。
6. 减少人工干预和提高安全性:工作站的自动化水平高,减少了对操作人员的直接依赖,降低了焊接作业中的安全隐患,同时,操作人员可以专注于监控和调整工作站的运行,而不是直接参与到危险的焊接过程中。
总之,推土铲焊接机器人工作站通过采用3轴行走正装机器人和先进的传感技术,不仅提高了焊接的可达性和质量,还优化了生产流程,降低了生产成本,为推土铲等大型结构件的焊接提供了高效、可靠和安全的解决方案。