.png)


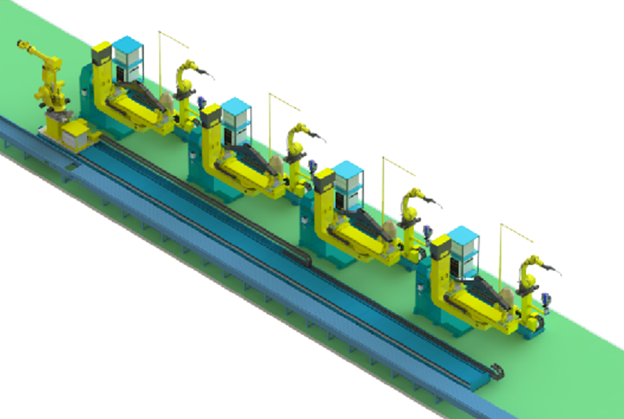
挖掘机履带梁焊接机器人工作站
挖掘机履带梁焊接机器人工作站,采用一轴行走正装机器人,不仅扩展了机器人的工作空间和系统柔性,还通过单轴翻转变位机实现了对多种长度工件的适应性焊接。
以下是该工作站的关键特点和优势:
1.一轴行走正装机器人:机器人安装在一轴行走机构上,能够在水平方向上自由移动。这种设计使得机器人能够覆盖更大的工作区域,从而提高焊接的可达性和灵活性。这对于处理大型或不规则形状的履带梁特别有用。
2. 扩展工作空间和系统柔性:一轴行走机器人的设计扩展了机器人的工作空间,使得机器人能够灵活地接近履带梁的不同部位,从而提高了系统的柔性,能够处理多种尺寸和形状的工件。
3. 单轴翻转变位机:变位机能够在工件周围进行连续转动,使得机器人能够从不同角度接近工件,实现连续焊接。这种设计提高了焊接过程的连续性和一致性,从而提高了焊接质量。变位机的可调性使得工作站能够适应不同长度的履带梁焊接需求。
4. 适应多种长度工件:单轴翻转变位机的可调设计,使得工作站能够处理不同长度的履带梁,提高了工作站的灵活性和适应性,能够满足多品种、小批量的生产模式。
5. 提高焊接效率:由于工作站能够灵活调整位置,减少了因工件更换而产生的停顿,工作站能够保持较高的焊接效率。同时,这种模式还有助于保持焊接过程的一致性和质量。
6. 增强生产柔性:工作站可以更容易地适应多品种、小批量的生产模式。在等待焊接工位完成时,工作站可以准备下一个不同型号或尺寸的履带梁,减少了生产线的转换时间,提高了生产系统的灵活性。
7. 优化资源配置:通过工作站的设计,可以更有效地利用工作站内的资源,包括机器人、焊接设备和工件夹具。在等待焊接工位完成时,工作站可以利用这段时间进行工件的装卸和准备,从而提高了设备的利用率和投资回报率。
综上所述,挖掘机履带梁焊接机器人工作站通过采用一轴行走正装机器人和单轴翻转变位机,不仅扩展了机器人的工作空间,提高了系统的柔性,还显著提高了焊接效率和生产效率,为履带梁等结构件的焊接提供了高效、灵活和经济的自动化焊接解决方案。