.png)


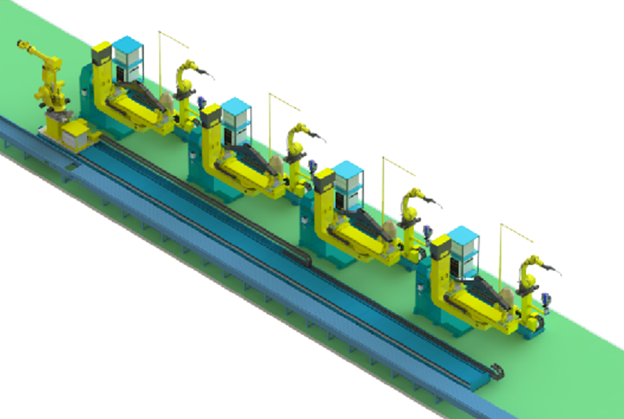
挖斗大组焊接机器人工作站
挖斗大组焊接机器人工作站采用10轴联动机器人。这种工作站的设计不仅扩展了机器人的工作空间,还显著提高了系统的柔性,能够适应复杂多变的焊接需求。
以下是该工作站的关键技术和优势:
1.10轴联动机器人:机器人本体通常具有6个自由度(轴),而额外的4轴联动来自于机器人变位机移动装置。这种高自由度的设计使得机器人能够**地调整姿态和位置,以达到**的焊接角度和路径,从而提高焊接质量和效率。
2. 机器人变位机移动装置一体式结构:这种设计将机器人和变位机紧密结合,不仅节省了空间,还提高了系统的灵活性。一体式的结构使得机器人能够在X、Y、Z三个方向上自由移动,同时通过变位机实现工件在空间上的多角度定位,使得机器人能够覆盖更大的作业区域,从而提高焊接的可达性和精度。
3. 扩展作业空间和工作站柔性:10轴联动机器人的设计扩展了机器人的工作空间,使得机器人能够灵活地接近挖斗大组的不同部位,从而提高了系统的柔性,能够处理多种尺寸和形状的工件。
4. 高性能接触传感和电弧传感:虽然您没有提及,但这种工作站通常还会配备先进的接触传感和电弧跟踪技术,能够实时检测工件的误差,自动调整焊接路径和姿态,确保焊接过程的一致性和质量。这种技术能够实时监测焊接过程中的工件位置变化,并作出相应的调整,从而提高焊接的精度和质量。
5. 纠偏功能:工作站通过接触传感和电弧传感技术,能够检测出工件的误差,并自动进行纠偏,确保焊接过程的稳定性和焊接接头的高质量。
6. 提高焊接效率:由于工作站能够灵活调整位置,减少了因工件更换而产生的停顿,工作站能够保持较高的焊接效率。同时,这种模式还有助于保持焊接过程的一致性和质量。
7. 增强生产柔性:工作站可以更容易地适应多品种、小批量的生产模式。在等待焊接工位完成时,工作站可以准备下一个不同型号或尺寸的挖斗大组,减少了生产线的转换时间,提高了生产系统的灵活性。
综上所述,挖斗大组焊接机器人工作站通过采用10轴联动机器人和机器人变位机移动装置一体式结构,不仅优化了空间利用,还提高了焊接质量和生产效率,为挖斗大组等结构件的焊接提供了高效、可靠和灵活的解决方案。